1 miesiąc temu
1 miesiąc temu
Naukowcy z Uniwersytetu Harvarda opracowali technologię MM3D (Multimaterial Multinozzle 3D Printing), która redefiniuje sposób wytwarzania złożonych systemów mechanicznych. Dzięki innowacyjnej głowicy wyposażonej w szybkie zawory pneumatyczne, system potrafi zmieniać podawany materiał do 50 razy na sekundę. Pozwala to na precyzyjne łączenie sztywnych polimerów z elastycznymi elastomerami w jednym procesie produkcyjnym, eliminując potrzebę późniejszego montażu poszczególnych komponentów.
Technologia aktywnego przełączania materiałów
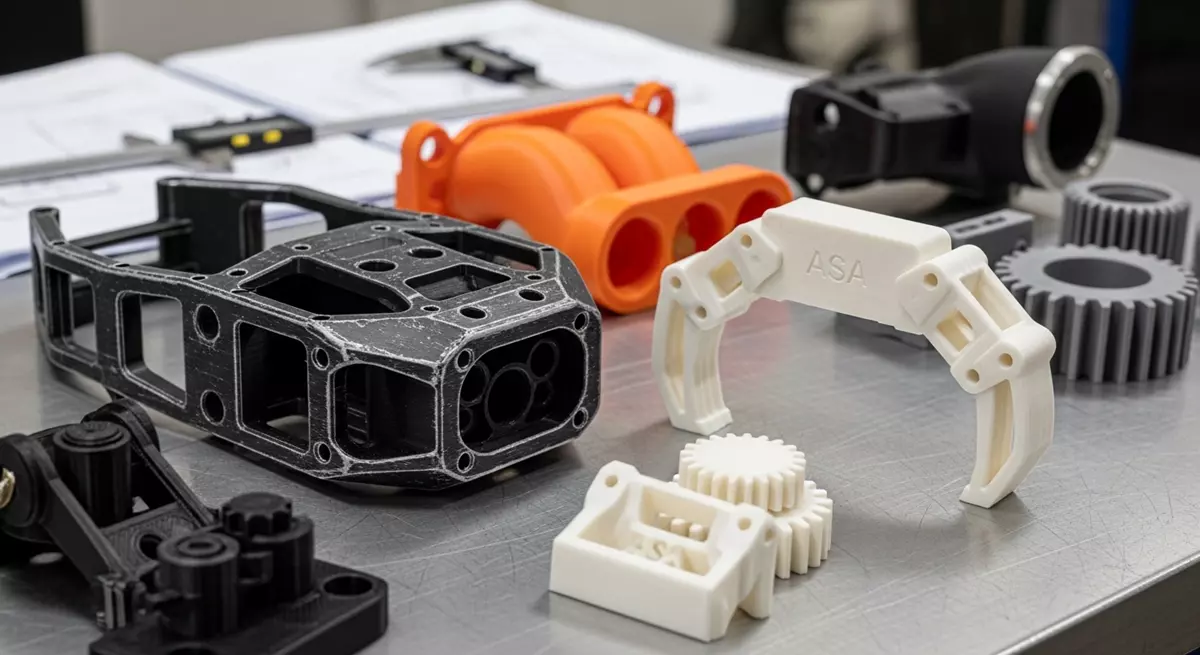
Fundamentem MM3D jest unikalna architektura dyszy, która zapobiega mieszaniu się różnych atramentów funkcjonalnych. Wewnątrz głowicy zachodzi dynamiczna wymiana substancji, co umożliwia tworzenie obiektów o programowalnych adekwatnościach fizycznych. Zamiast budować proste bryły, inżynierowie mogą teraz projektować wewnętrzne kanały pneumatyczne i zintegrowane czujniki bezpośrednio w strukturze urządzenia.
Zastosowanie matryc wielodyszowych sprawia, iż proces ten jest znacznie szybszy niż klasyczna ekstruzja. Dzięki temu możliwe jest masowe wytwarzanie struktur, które posiadają wbudowaną inteligencję mechaniczną. Przykładem zastosowania są urządzenia potrafiące poruszać się pod wpływem zmian ciśnienia, co znajduje szerokie zastosowanie w medycynie i zaawansowanej diagnostyce.
Alternatywy dla terminologii miękkiej robotyki
Pojęcie „miękka robotyka” jest najpowszechniejszym określeniem tej dziedziny, jednak w literaturze fachowej i tekstach eksperckich coraz częściej stosuje się zamienniki lepiej oddające naturę tych urządzeń. Można posłużyć się terminem robotyka elastyczna lub robotyka polimerowa, które kładą nacisk na rodzaj użytego budulca. W kontekście inżynierskim często spotyka się również określenie robotyka podatna (compliant robotics), odnoszące się do zdolności struktur do bezpiecznej deformacji i adaptacji do otoczenia.

Robotyka biomimetyczna i programowalna
Inną drogą jest nazewnictwo oparte na funkcjonalności. jeżeli urządzenie naśladuje ruchy organizmów żywych, mówimy o robotyce biomimetycznej. Z kolei technologie takie jak MM3D pozwalają na użycie terminu robotyka programowalna, gdzie adekwatności ruchu są zakodowane bezpośrednio w geometrii wydrukowanego materiału. Wybór konkretnego określenia zależy zwykle od tego, czy chcemy podkreślić materiał, sposób sterowania, czy też inspirację naturą.