1 rok temu
1 rok temu
Wyobraź sobie ławicę małych rybek danio pręgowanego (zebrafish) płynącą w perfekcyjnej synchronizacji, bez widocznego przywódcy. Naukowcy z Uniwersytetu Konstancji (Niemcy) postanowili odkryć, jak ryby to robią. W nowym badaniu wykorzystali system wirtualnej rzeczywistości, by umieścić młode zebrafish we wspólnej, sieciowej „matrycy”.
Każda ryba mogła pływać obok innych, w tym przywódców stada i „holograficznych” towarzyszy, którzy w rzeczywistości byli wirtualnymi projekcjami zachowań ryb z innych akwariów. Taki wirtualny świat pozwolił precyzyjnie sterować bodźcami wizualnymi i sprawdzać, które sygnały wzrokowe są najważniejsze przy koordynacji ruchu.
Wirtualna szkoła ryb
Naukowcy z Konstancji zbudowali sieć połączonych akwariów, w których każda młoda rybka płynęła razem z kilkoma wirtualnymi koleżankami. Każdy „wirtualny” osobnik był projekcją ruchów prawdziwej ryby z innego zbiornika – można to sobie wyobrazić jak Matrix dla ryb. Taki układ pozwolił badającym precyzyjnie zmieniać pozycje i zachowania liderów, jednocześnie obserwując reakcje ich partnerów. Dzięki temu badacze mogli wyizolować dokładnie te sygnały wzrokowe, z których ryby rzeczywiście korzystają, pływając w ławicy.
Eksperymenty wykazały coś zaskakującego: młode zebrafish prawie nie reagują na chwilowe zmiany prędkości sąsiadów. Ryba utrzymuje kontakt z liderem niezależnie od tego, czy ten płynie z prędkością ciągłą, czy przerywaną (tzw. burst-and-glide), wyniki reakcji były praktycznie identyczne. Wniosek jest prosty: kluczową informacją dla ryby jest pozycja innych osobników, a nie ich natychmiastowa prędkość. Prędkości brane są raczej w pewnym uśrednieniu (ok. 0.2 sekundy pamięci wzrokowej) niż jako sygnał w każdym ułamku sekundy. Jak zauważa Iain Couzin, współautor publikacji.
„Jesteśmy zaskoczeni, iż rybom wystarcza tak kilka informacji, by skutecznie koordynować ruchy w ławicy. Używają one prostych reguł lokalnych, które są minimalne poznawczo, ale funkcjonalnie doskonałe”.
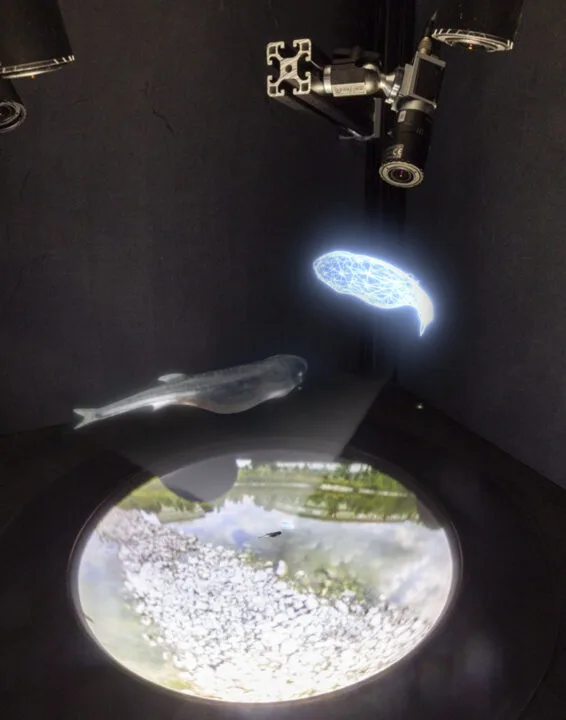 Matrix dla ryb / Źródło: science.org
Matrix dla ryb / Źródło: science.orgProstota modelu BioPD
Z tych obserwacji naukowcy wyprowadzili bardzo prosty algorytm sterowania (nazwany BioPD – biologiczny regulator proporcjonalno-różniczkujący). W uproszczeniu algorytm ten oblicza przyspieszenie ryby na podstawie odległości do lidera oraz niewielkiej „pamięci” ostatnich zmian prędkości. Innymi słowy: jeśli follower oddala się od lidera, przyspiesza, a jeżeli oddala się w bok, koryguje ruch, wszystko z wykorzystaniem tylko różnicy pozycji (część proporcjonalna) i różnicy prędkości uśrednionej (część różniczkowa).
Mimo tej prostoty model BioPD świetnie odtwarza rzeczywiste zachowanie stada: follower płynie z taką samą, stabilną średnią prędkością i utrzymuje podobną pozycję względem lidera jak w eksperymencie. Innymi słowy – mimo iż model zawiera tylko dwa podstawowe parametry (tzw. Kp i Kd), jego działanie pokrywa się z obserwacjami z eksperymentu.
 Matrix dla ryb / Źródło: science.org
Matrix dla ryb / Źródło: science.orgBy upewnić się, iż algorytm naprawdę oddaje naturalne interakcje, zespół przeprowadził także eksperyment przypominający test Turinga – tym razem z rybami zamiast ludzi. W akwarium jedna z ryb przywódców prowadziła prawdziwą grupę, ale gdy zmieniała się rola – follower stawał się liderem – system zastępował go wirtualnym partnerem sterowanym algorytmem BioPD. Dzięki temu badano dwukierunkową interakcję między osobnikiem żywym a zaimplementowanym zachowaniem. Wynik był interesujący: ryby nie potrafiły odróżnić prawdziwego towarzysza od wirtualnego. Zachowały się identycznie zarówno w obecności prawdziwej ryby, jak i jej algorytmicznego sobowtóra. Pokazuje to, iż BioPD wiernie naśladuje naturalne reguły komunikacji w stadzie.
Przykłady zastosowań
Algorytm wypracowany przez ryby ma konkretne zastosowania inżynierskie. Badacze przełożyli go na różne platformy robotyczne, w tym samochody autonomiczne, drony latające w formacji i roboty pływające (np. autonomiczne łodzie). W zadaniu podążania za wyznaczonym celem (śledzenia „lidera” w zaprogramowanym kursie) prosty algorytm zebrafish sprawdził się znakomicie. We wszystkich testach wydajność BioPD była niemal nieodróżnialna od zaawansowanego sterowania typu Model Predictive Control (MPC) – zarówno pod względem dokładności, jak i zużycia energii – ale przy znacznie mniejszej złożoności obliczeniowej. Ponadto BioPD działało efektywnie bez żadnego specjalnego dostrajania pod konkretne maszyny, używając tych samych wartości parametrów we wszystkich platformach.
Przykładowe obszary praktycznych zastosowań:
- Autonomiczne pojazdy: samochody samojezdne mogą utrzymywać bezpieczne odstępy i synchronizować prędkość w kolumnie, korzystając tylko z lokalnych odległości.
- Formacje dronów: grupa dronów może lecieć w zwartej formacji (np. przy filmowaniu czy akcji ratunkowej), nie kolidując ze sobą, dzięki prostym regułom pozycji.
- Roboty wodne: łodzie lub podwodne pojazdy mogą manewrować wspólnie, wykorzystując algorytm zebrafish do sterowania bez centralnego nadzoru.
- Zespoły robotów przemysłowych: w halach produkcyjnych inteligentne roboty współpracujące mogą koordynować ruchy w grupie przy minimalnej wymianie informacji.
To badanie pokazuje, iż ewolucyjnie wypracowane przez przyrodę strategie mogą inspirować nowoczesne rozwiązania inżynieryjne. Proste algorytmy z ławicy ryb okazały się bardzo wydajne i odporne, a jednocześnie wymagają minimalnej mocy obliczeniowej i sensorycznej.